What is a Social Mini-Game?
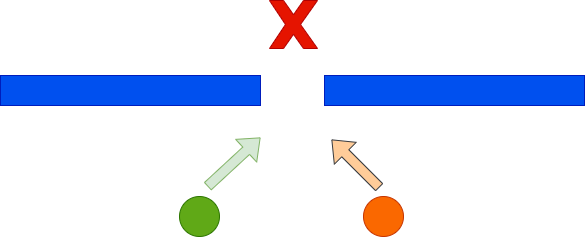
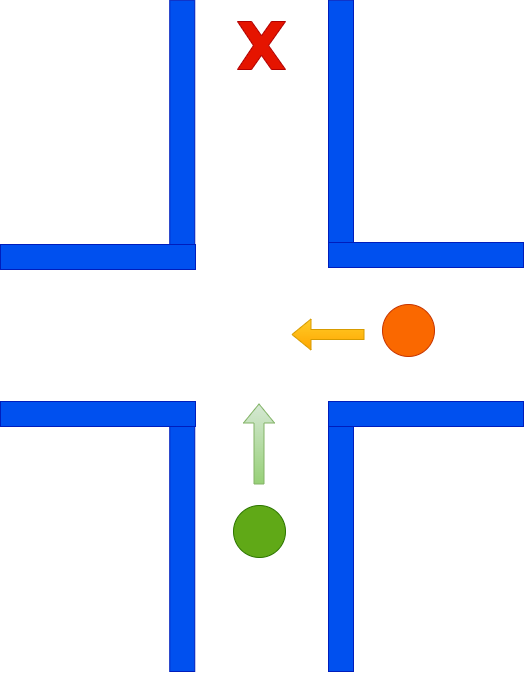
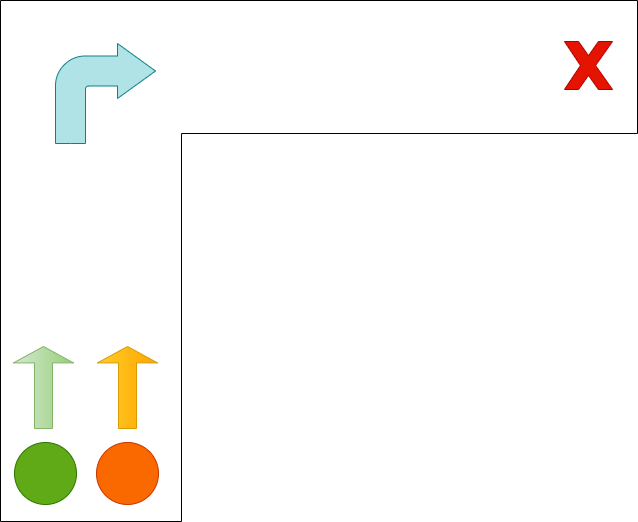
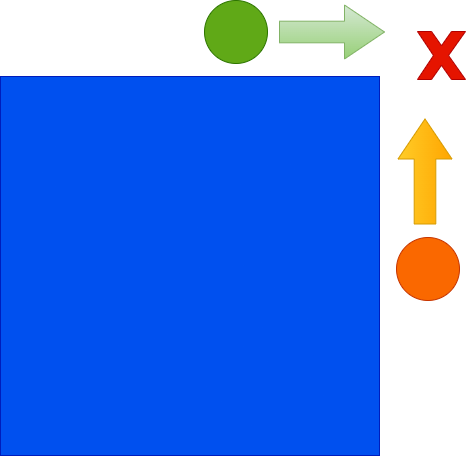
Social Mini-Games (SMGs) are tightly coupled, high-agency interactions
that arise when two or more robots compete for space in constrained environments —
doorways, hallways, corridor intersections. Unlike general multi-robot navigation,
SMGs require specialized solvers and dedicated metrics because small actions
significantly impact all agents involved.
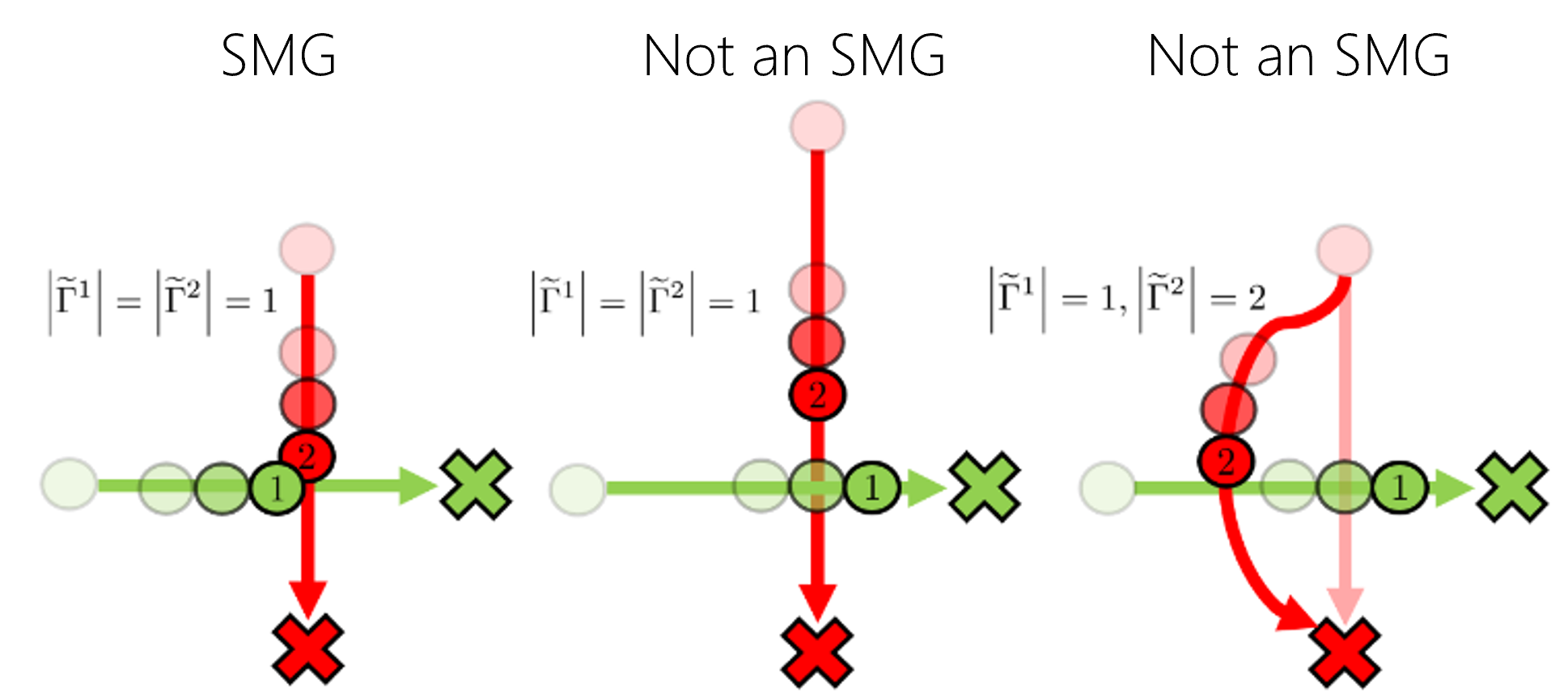
An SMG arises when preferred trajectories conflict — forcing coordination.